Innovations generated in the field of autonomous navigation and use cases for artificial intelligence can only work on the most sophisticated robots and not on older devices? – Think again!
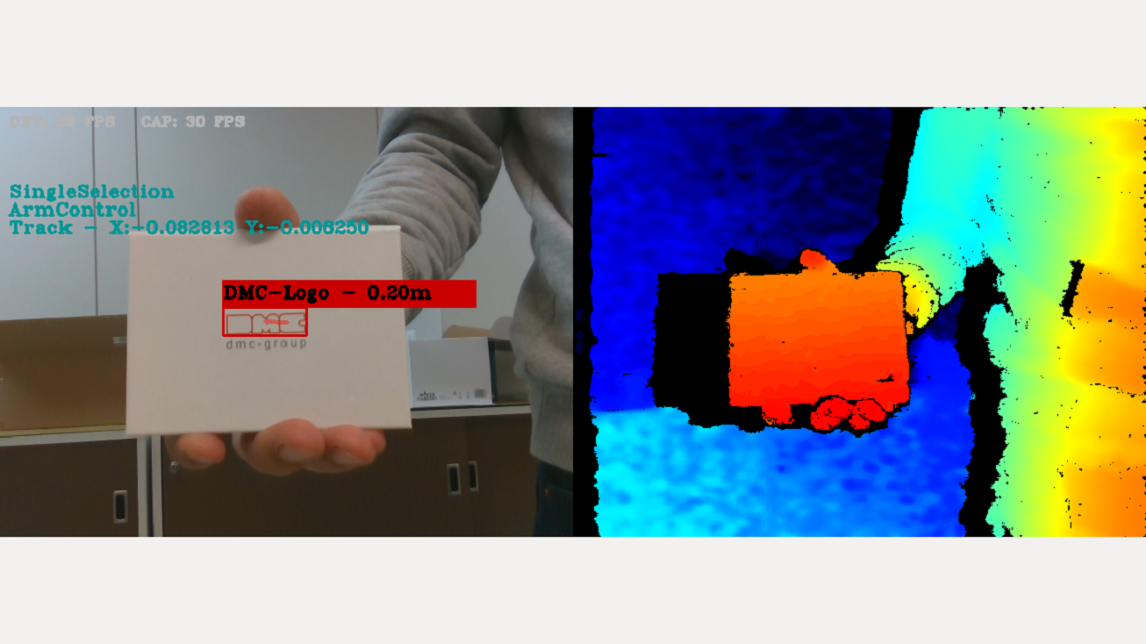
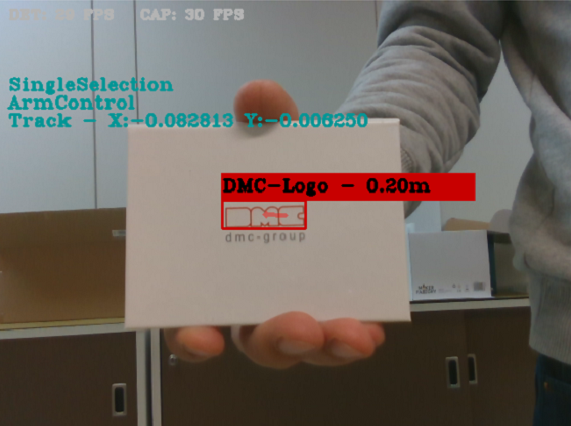
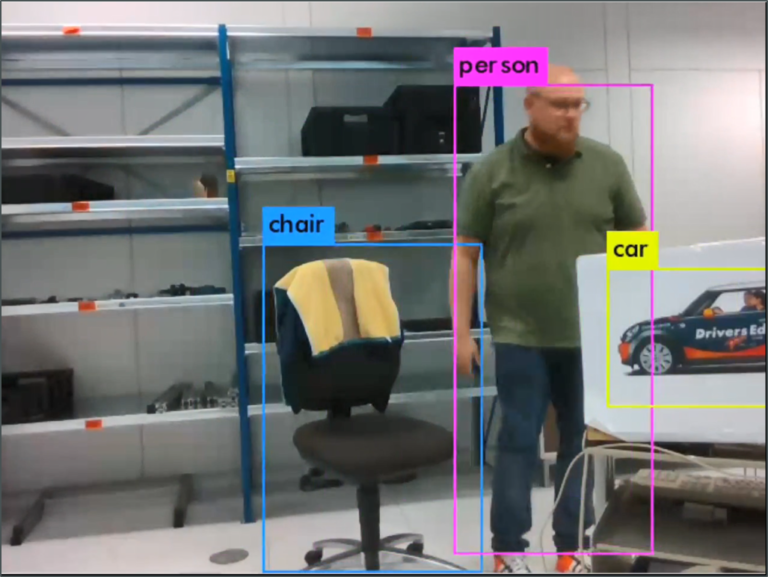
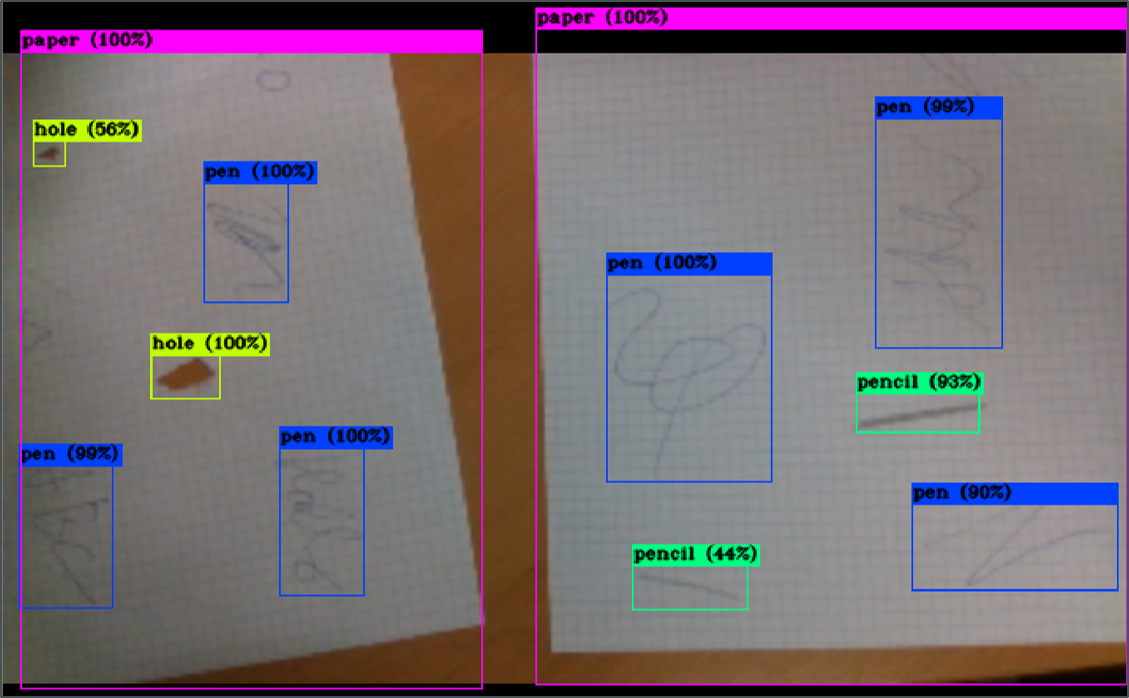
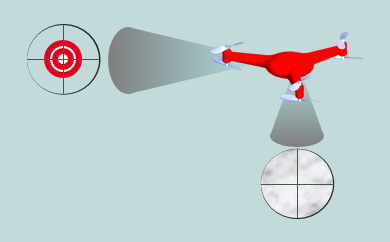
Our showcase Smart Navigation shows how to realize even complex use cases such as the recognition and tracking of any object on a small, simple robot arm – even if you start with only one serial interface!
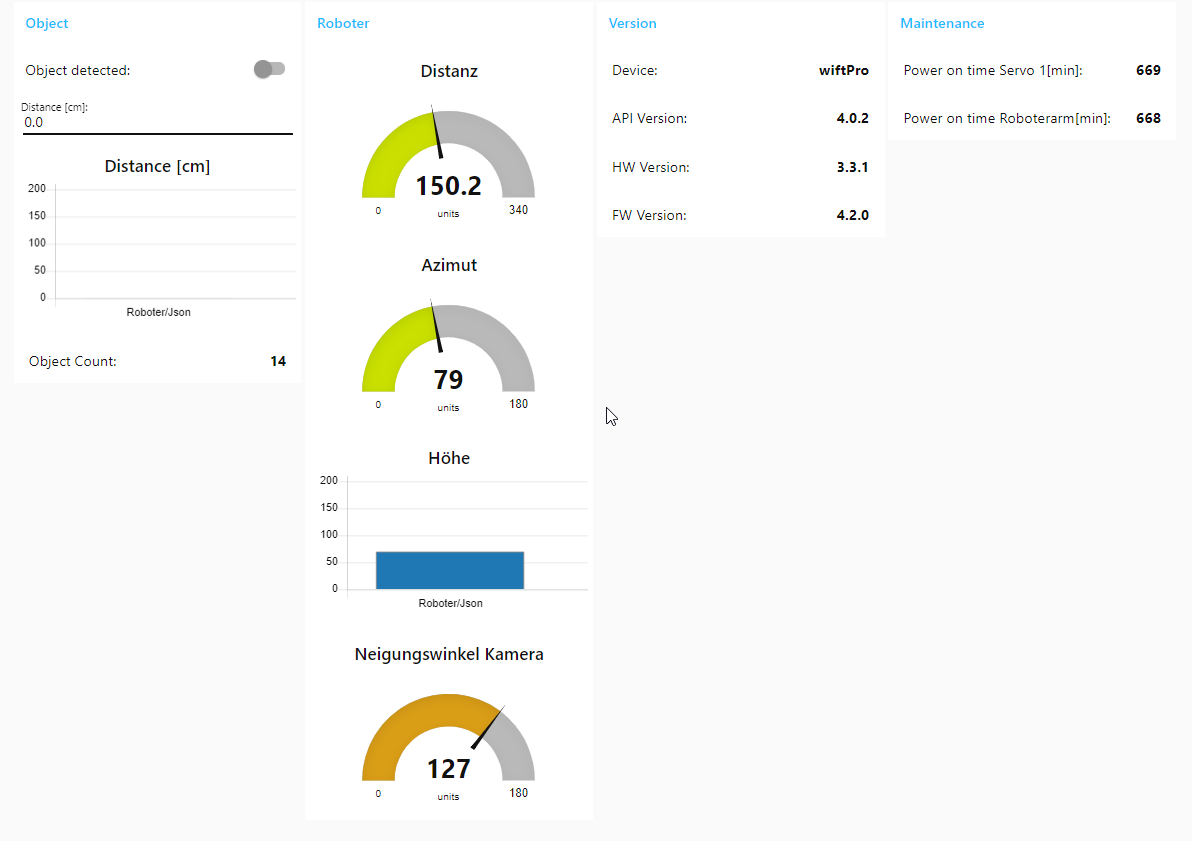
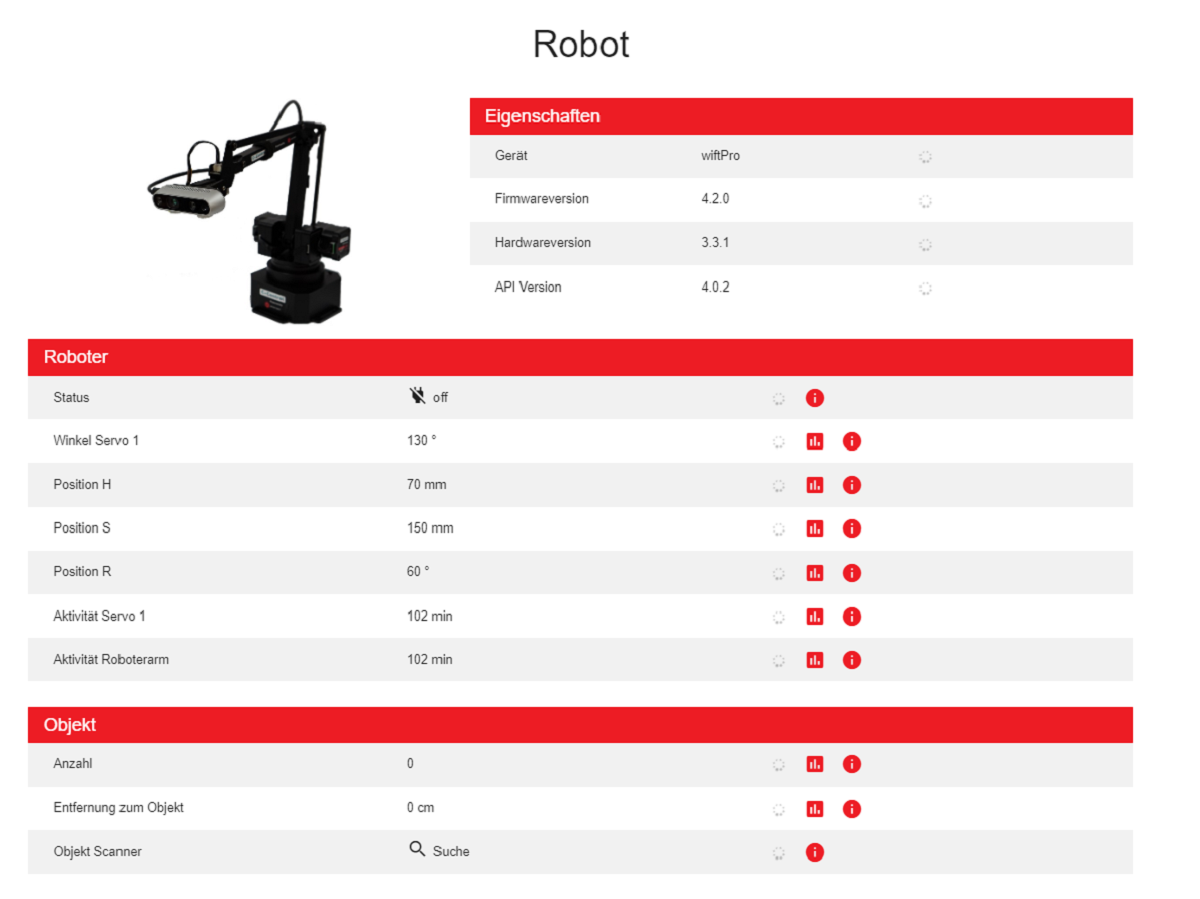
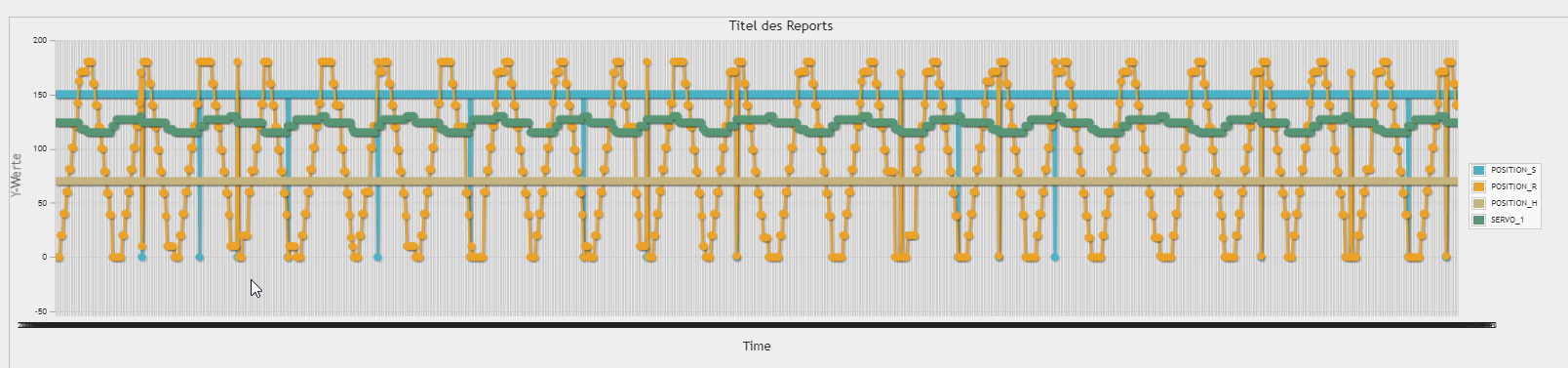
In addition, it demonstrates an example how the robot’s resulting live machine data can be processed intelligently and how they can be enriched and statistically evaluated.
The following video provides more details: